建议修改mavros_posix_sitl.launch前备份一个要修改的文件,或者像我一样,改名为mavros_posix_sitl_camera.launch
添加后如图:
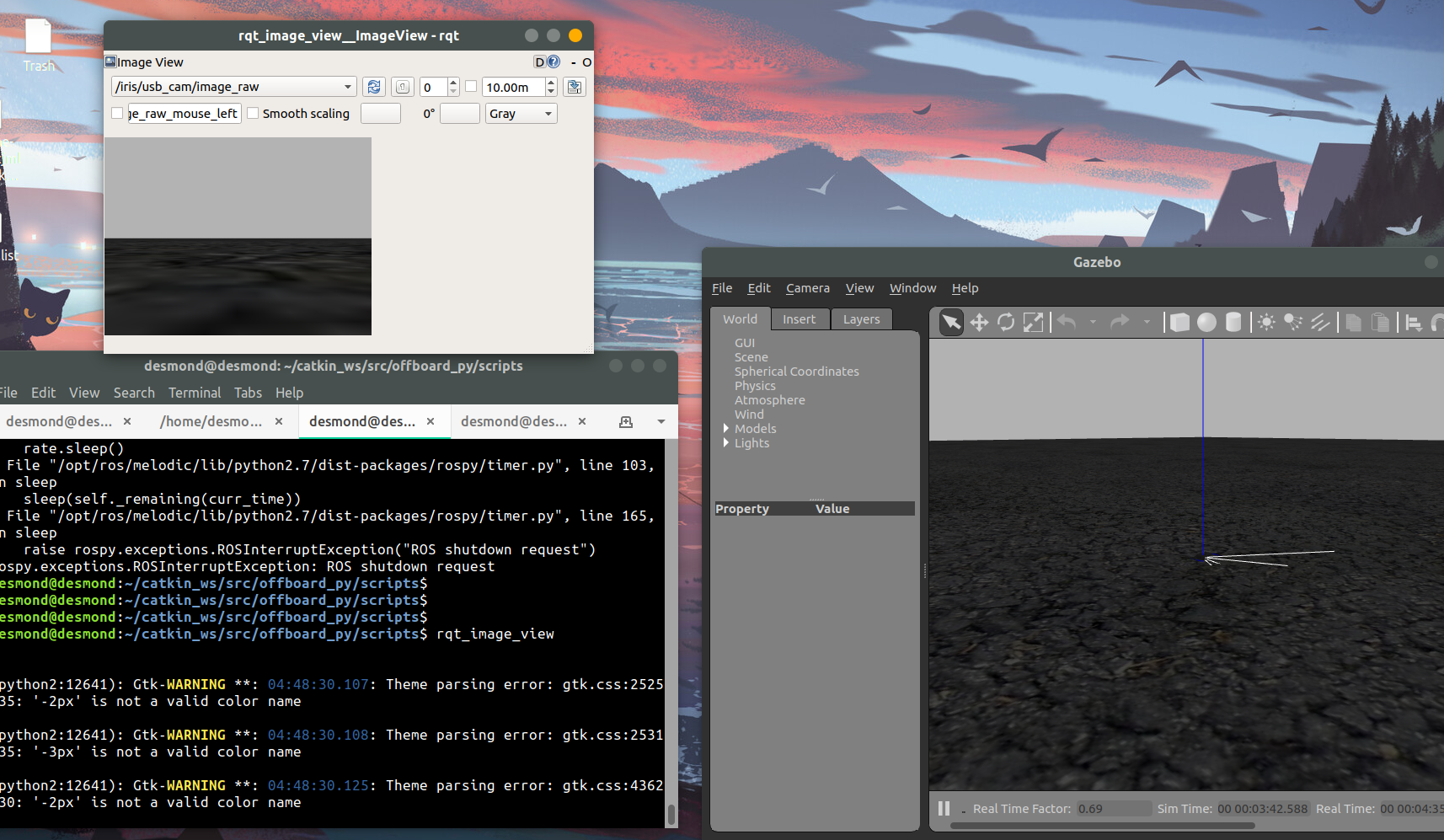
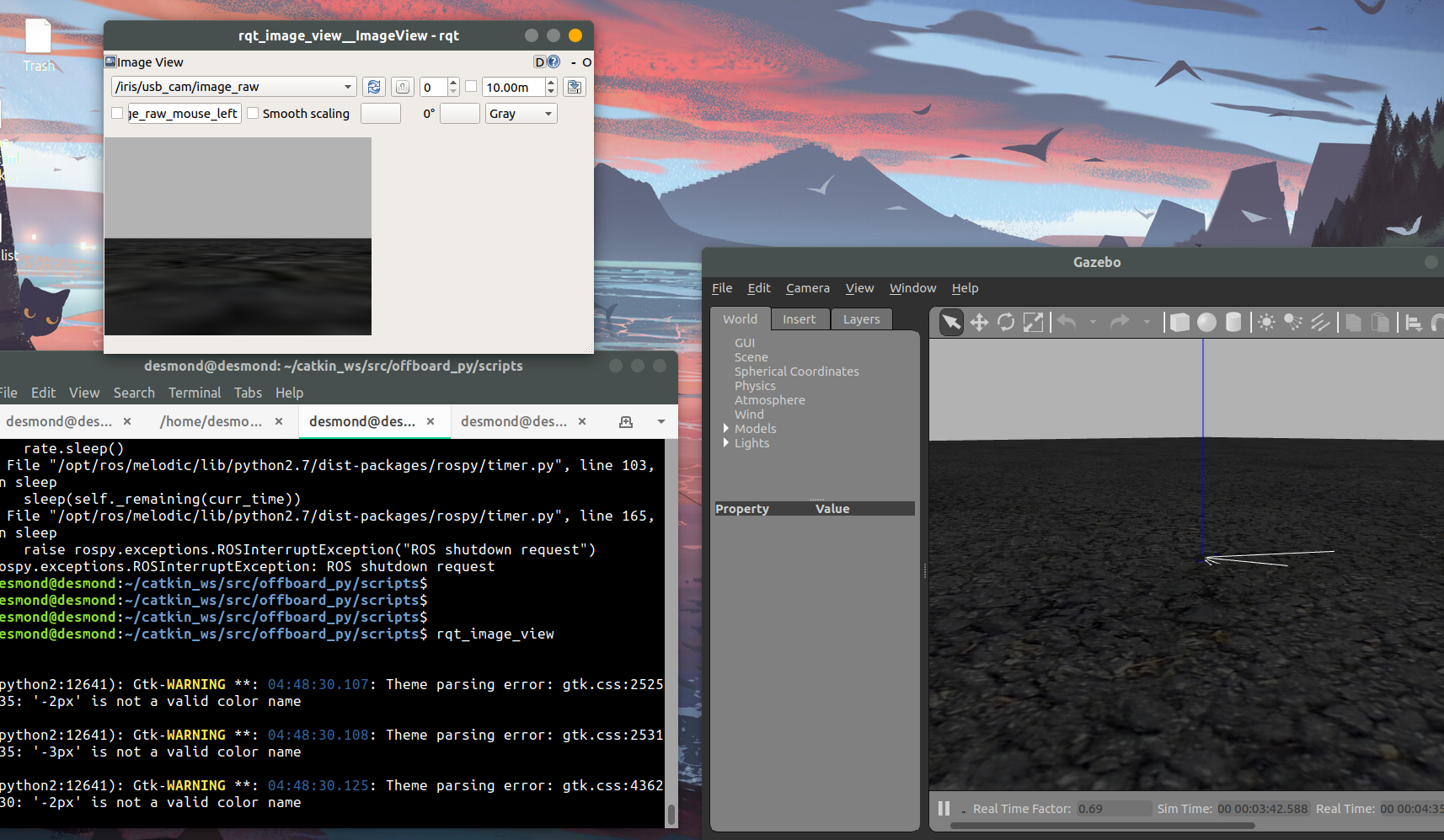
查看图像:rqt_image_view
建议修改mavros_posix_sitl.launch前备份一个要修改的文件,或者像我一样,改名为mavros_posix_sitl_camera.launch
添加后如图:
查看图像:rqt_image_view

© 2020 - 2023 比海还广阔的,是星辰大海